
新品上架
-
头枕、靠垫、座椅、床垫设计
¥压力分布测量系统,压力感应垫 -
柔性压力垫压力测量系统
¥柔性压力传感器 -
Xsens MVN Analyze惯性运动捕
¥运动捕捉分析软件 -
ViveLab Ergo3D虚拟空间中的
¥运动捕捉,人机工程学

产品介绍
机器人触觉传感器uSkin

uSkin触觉传感器
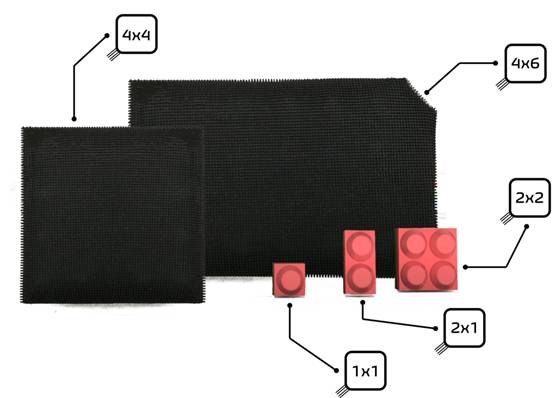
XELA Robotics分布式三轴力触觉传感器,采用薄,柔软,耐用的模组。这为机器人提供了类似人的触觉,从而使他们能够精确地抓握和操纵物体。XELA uSkin可以轻松集成到各种机器人手和夹具中。

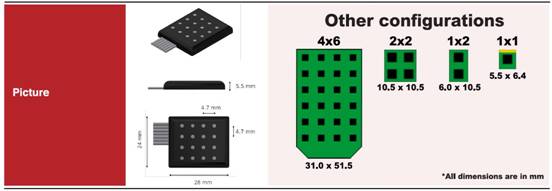
XELA的3轴力传感器阵列,用于实现机器手和夹爪的触觉感知。XELA触觉感应阵列,具有小巧、轻薄、柔软、耐用,布线少等优点。uSkin传感器阵列具有1×1、2×1、2×2、4×4、4×6多种规格。
1、数字输出
提供数字输出,只需要几根细线,不需额外模数转换器。提供快、精确的测量,同时将电噪声和干扰降低。
2、柔软耐用
这种柔软传感器,能够处理易碎物体而不会损坏它们。不同尺寸、形状、硬度和重量的物体可以可靠地抓握和操作。柔软性还可确保传感器对过载具有高度的弹性,使其耐用。
3、易于集成
XELA提供触觉皮肤传感器,可轻松集成,以简单地粘附或连接方式进行安装。

应用场景与案例

应用场景与案例
服务机器人
食品药品抓取机器人
农业采摘机器人
咨询该商品价格
品名:XELA机器人触觉传感器uSkin
其他商品
-
头枕、靠垫、座椅、床垫设计压力
¥压力分布测量系统,压力感应垫 -
柔性压力垫压力测量系统
¥柔性压力传感器 -
OpenCV软硬一体人工智能机器视觉
¥人工智能机器视觉