
产品介绍
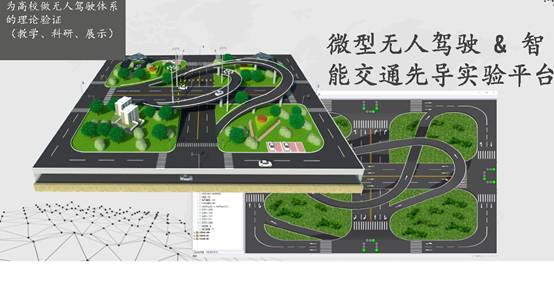
微型智能车无人驾驶与人工智能多智能体控制系统实验模拟平台
科研 教学 规划 展示
更多智能机器人、无人车及传感器融合与运动捕捉解决方案@南京合越智能
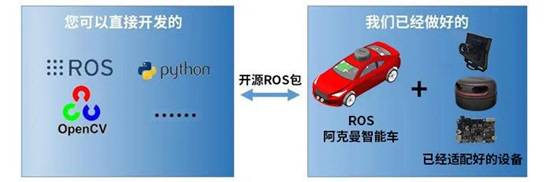
ROS全开源阿克曼转向智能网联无人驾驶车”已经为开发人员简化ROS入门所需要的预备知识,编码器、IMU、PID以及底盘的运动学模型,可以不用担心,只需要掌握基本的Linux操作系统和ROS机器人操作系统的基本概念,就可以在ROS开源的智能小车基础上完成机器人的控制、SLAM建图、自动导航、避障等操作。
基于微型无人车的人工智能实验平台8大场景:
传感器融合,
视觉检测流量分析,
交通调度,
模拟驾驶,
安全避障超车,
车联网规划模拟,
多机器人协同控制,
运动定位。
8大领域研究于一身!科研教学两相宜。
实验平台概况
实验平台项目

平台交叉学科创新体系

科研支持

功能模块

系统构架

涉及的技术领域

微型智能车功能

中控系统

软件UI
智能沙盘模拟

更多智能机器人、无人车及传感器融合与运动捕捉解决方案@南京合越智能

咨询该商品价格
品名:开源ROS微型智能车无人驾驶与人工智能多智能体控制系统实验模拟平台
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR