
产品介绍
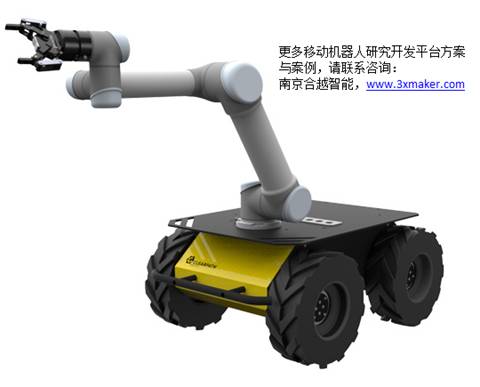
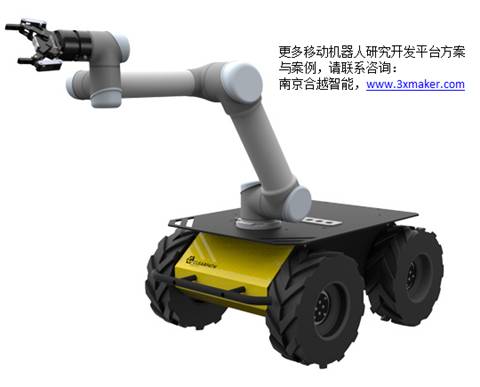
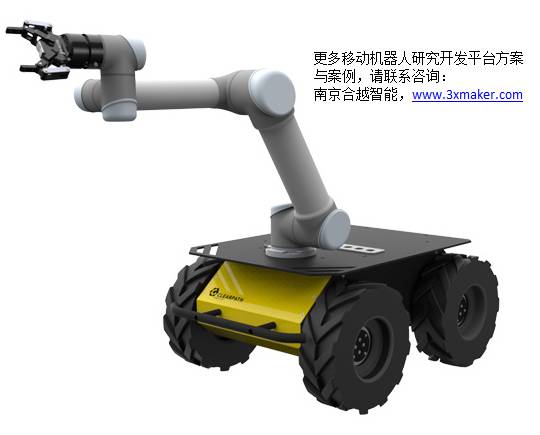
基于Husky与UR的复合操作移动机器人研究开发平台
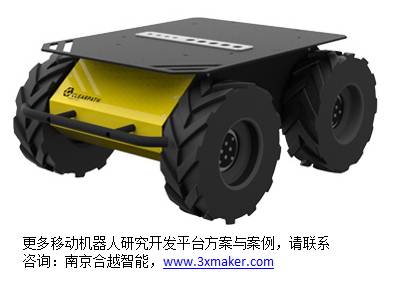
Husky(Husky)是一个clearpath中型机器人开发平台。其巨大的有效载荷容量和动力系统可容纳多种有效载荷,可根据研究需求进行定制。立体摄像机,激光雷达,GPS,IMU,操纵器等可以由我们的集成专家添加到UGV中。Husky坚固的结构和高扭矩传动系统可以将您的研究带到其他机器人无法企及的地方。ROS由社区驱动的开放源代码和示例完全支持ROS。
特征
易于使用
Husky是在工厂设置中支持ROS的现场机器人平台。使用Husky(Husky)与现有研究集成,并在蓬勃发展的ROS社区中建立不断增长的知识基础,以更快地开始产生研究结果。Husky(Husky)使用开源串行协议,我们为ROS提供API支持,并为C ++和Python提供选项。
地毯和全地形
Husky(Husky)是一款优雅简洁的设计,采用耐用的材料制成,几乎没有活动部件。其高性能,免维护的动力传动系统和大型胎面轮胎使Husky能够应对富有挑战性的现实地形。它将持续多年的生产性研究。
值得信赖的基准
使用Husky作为测试装置的大量研究论文已经发表。Husky为建立新的机器人研发工作提供了可靠的基准。
精密控制
Husky拥有高分辨率的编码器,可提供改进的状态估计和推算功能。经过微调但用户可调的控制器,即使在低速(<1cm / s)时也能提供平滑运动曲线,并具有抗干扰性。
可自定义
我们的移动机器人专家团队可以帮助您选择和集成有效负载,然后在工厂配置机器人。Husky(Husky)与我们广泛的机器人附件即插即用兼容,我们的系统集成商将提供集成的交钥匙机器人。
技术规格
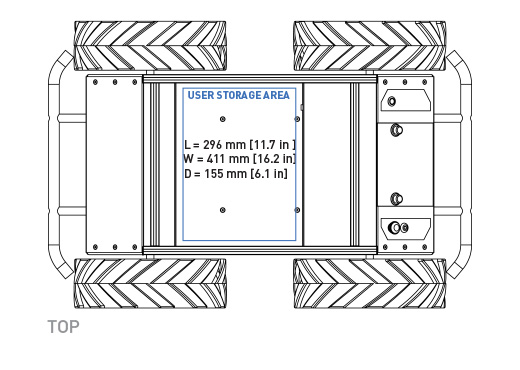
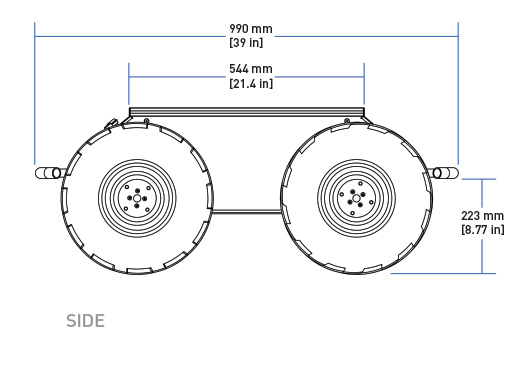
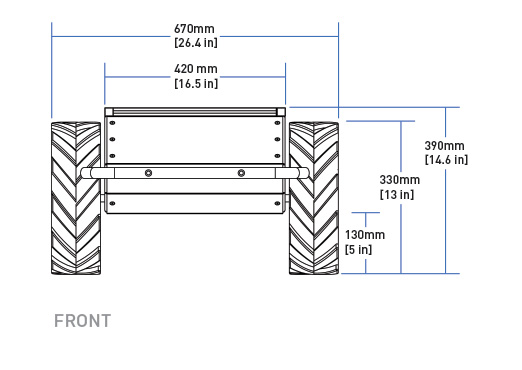
尺寸和重量
速度与性能
基于Husky的复合操作机器人
Husky将通过Universal Robots的UR5机械手和Robotiq的2指85mm抓手与周围的世界互动。UR5通过自定义电子设备外壳和车辆上的电源安装到Husky(Husky)顶板上。手臂可以延伸到0.85m并承载5kg的有效载荷,并且对人类安全。ROS完全支持UR5和Robotiq抓手,并在平台的Mini ITX计算机系统上预装和配置了软件包。
示例应用
· +户外自主导航
· +远程检查和远距离远程操作
· +更大比例的地图和本地化
随附配件
· + UR5机械臂
· + 2个FINGER 85 Robotiq抓手
· +顶板
· +迷你ITX电脑
· +备用电池
特色升级
· + UGV上的第二个UR5和抓爪
· + Robotiq 3指夹
· +激光雷达
· +大黄蜂BB2立体声相机
此外,基于Husky的移动机器人研究开发底盘根据不同研究方向预设不同资源包平台:
1、资源管理器包
配备了全套传感器(激光扫描仪,GPS和照相机)的Husky Explorer套件可实现基本的室内和室外自主功能。预先装有Linux和ROS的功能强大的Mini-ITX计算机系统。所有组件ROS驱动程序均已安装并预先配置。Husky Explorer Package通过消除对设计,制造和集成系统的需求,从而节省了时间和金钱,从而加快了开发速度。
应用范例
· +户外GPS导航
· +障碍物检测与避免
· +本地化和映射
· +路径规划
· +传感器融合
· +辅助遥控
随附配件
o +打开IMU
o +备用电池
o +顶板
o +带有游戏手柄的Mini ITX电脑
o + TP-Link路由器
o + LMS111激光
o + GPS
特色升级
§ + UR5通用机械臂
§ + Robotiq 3指爪
§ + Robotiq FT 150力扭矩传感器
2、EXPLORER PRO套件
Explorer Pro软件包提供了Explorer软件包的更高版本。它使用先进的传感器并进行升级,以提供远程的户外自主平台。一台50m SICK LMS-151 LIDAR可以进行长距离地形量化和制图,而一个云台变焦IP摄像机则可以进行远距离远程操作。赫斯基(Husky)装备了抵御气候变化的IP56防护等级,可在户外操作,还配备了升级的锂电池组,使系统运行时间加倍。
示例应用
· +户外自主导航
· +远程检查和远距离远程操作
· +更大比例的地图和本地化
随附配件
o + GPS,IMU和Mini ITX
o + Clearpath基站
o +锂电池
o + LMS-151激光雷达
o + IP55防水升级
特色升级
§ + Flea3相机
§ + UR5通用机械臂
§ + Robotiq 3指爪
§ + Robotiq FT 150力扭矩传感器
更多移动机器人研究开发平台方案与案例,请联系咨询:南京合越智能科技有限公司,www.3xmaker.com



咨询该商品价格
品名:基于Husky与UR的复合操作移动机器人研究开发平台
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR