
产品介绍
机器人灵巧手
产 品 介 绍
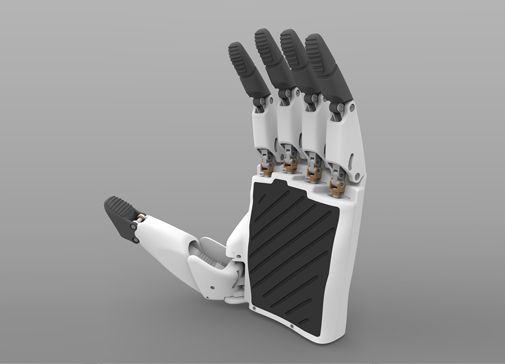
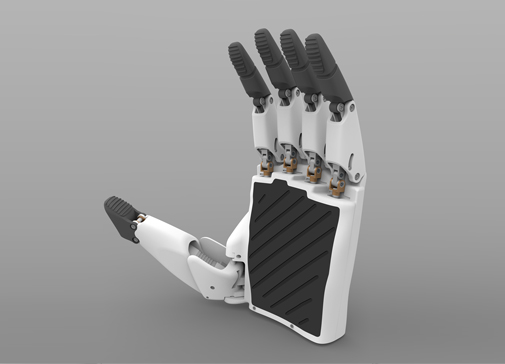
机器人灵巧手采用创新型直线驱动设计,内部集成了6个微型直线伺服驱动器和5个压力传感器,可以模拟人手实现精准的抓取动作。主要应用场合包括:服务机器人、假肢、教育科研等领域。
产 品 参 数
主要参数 | |
自由度 | 6 |
压力传感器分辨率 | 0.5N |
指尖重复定位精度 | ±0.2mm |
指尖抓握力 | 10N |
工作电压 | 6-8.4V |
控制接口 | RS232/通用异步串行收发器 |
产 品 尺 寸
因时新一代灵巧手首次公开亮相。相比上一代产品,新版的灵巧手进行了整体优化升级:
◆ 四指连杆机构强化升级,可承受5倍过载不损坏,采用高性能力控反馈直线驱动器,力控更精准;

◆ 拇指采用因时LAS系列短尺寸直线驱动器,尺寸比例更仿生,力度提升1.5倍并增加了外力缓冲保护机构及双自由度力控功能;
◆ 手掌骨架结构采用航空级铝合金材质制作,质量轻,刚性好;
◆ 灵巧手采用内骨架设计,驱动、传感、控制模块化安装在手掌骨架上,结构紧凑易于维护,外壳可以任意更换,满足个性化ID设计和不同应用场景的材料要求。
经过优化升级的灵巧手,整体功能更加强大、可靠性更高、质量更轻,可以完成大多数常见物品的抓取和操作。

咨询该商品价格
品名:机器人灵巧手--国内自主机器人应用手指夹持器
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR