

产品介绍
Visevi 基于视觉与电子皮肤融合的机器人触感与识别抓握系统
我们的智能抓取系统是适用于灵活且灵敏的抓取应用的即用型解决方案。它集成了工业抓手,立体视觉系统以及我们基于摄像头的传感器,用于提供触觉数据和可选的力/扭矩。

更多机器人触觉、力控与安全传感器 解决方案@南京合越智能@3xmaker.com
技术解决方案:
我们的智能抓取解决方案将两个灰度/彩色摄像头,一个工业2爪抓取器以及通用手指集成在带有标准安装座的紧凑型包装中。手指配有一层泡沫橡胶,以支持基于相机的触觉感应。
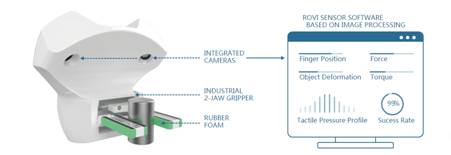
我们传感技术的核心是图像处理软件,该软件从对橡胶泡沫在接触过程中变形的观察中得出物理传感器信号。因此,传感器功能从复杂的专用硬件模块转移到了我们的智能传感器软件中。该传感器软件可提供有关抓握过程的丰富反馈,包括触觉/压力曲线,抓握力,抓爪张开,物体位置/数量,物体形状,物体变形和详细的抓握统计信息。利用这些数据,我们的多目标抓取控制器可以智能灵活地抓取各种物体。
更多机器人触觉、力控与安全传感器 解决方案@南京合越智能@3xmaker.com

我们已获得专利的传感器原理使您可以轻松地更换或调整机械手的手指。这是由于这样的事实,即手指不需要布线,因为橡胶泡沫是完全无源的,并且没有任何集成电子设备。
同时,摄像机可用于其他各种任务,例如对象识别和定位。请与我们联系以讨论您的计算机视觉要求。
产品特色:
灵敏的抓取力
物体和深度识别
丰富的传感器反馈

基于相机的传感技术已获得专利,并由慕尼黑工业大学(TUM)开发。
监控抓取过程,以确保准确和牢固的抓取。
各种机器人末端夹具支持

更多机器人触觉、力控与安全传感器 解决方案@南京合越智能@3xmaker.com
技术参数:

*技术数据仅描述了当前的原型。
咨询该商品价格
品名:Visevi 基于视觉与电子皮肤融合的机器人触觉与识别抓握系统
其他商品
-
Visevi 基于视觉与电子皮肤融合
¥机器人视觉与触觉 -
Robotiq 自适应3指夹持器/夹爪
¥Robotiq -
Pickit 3D机器人视觉系统
¥机器人视觉