
热门资讯
人机交互技术如何让机器人协作医疗人员共同应对未来的突发不确定性
来源:3XMaker 发布时间:2022年12月11日人机交互技术如何让机器人协作医疗人员共同应对未来的突发不确定性
关键词:增强智能,医疗机器人,人机交互,多感官传感器融合,AI自主学习
新冠疫情显示了机器人系统当前的一些局限性,使其无法在困难,多变的大规模环境中可靠地运行和适应。繁忙医院中的机器人需要能够处理意外事件和不确定性。研究需要集中在推进医疗保健机器人的自主性和学习策略上,因此他们只能在有限的监督下执行任务。在不久的将来,医疗机器人的最现实方法是共享自主权,它将医学专家的知识与机器人的能力相结合。
人机交互的进步(例如提高机器人的感觉,触摸和决定能力)将决定明天的机器人是否将帮助医院在下一波可能发生的紧急卫生事件之前保持从容和得心应手。
机器人技术可以在三个主要领域提高患者的护理水平和提供者的安全性:(1)尽量减少护理人员与感染患者的接触,以减少感染的传播;(2)提高临床提供者的能力和效率,使他们可以专注于重要任务;(3)通过限制提供商进入隔离区域的次数来减少PPE的供应需求。该评论总结了医疗机器人技术的最新状况,以应对这些挑战。它提出了如何利用最新技术来开发高度灵活和多功能的机器人,以应对未来的传染病危机。总体而言,需要在机器人感测,操纵和自主性方面取得进步,以提高机器人的感觉,触摸和决策能力。
为了应对传染病急性护理方面的临床挑战,人机机器人物理合作伙伴关系的融合研究领域,包括传感,操纵和自主性,将使高度灵活,用途广泛的医疗机器人具有增强的感知,触摸和决策能力。
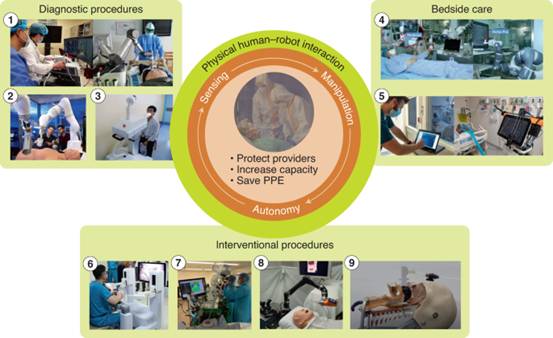
图中的机器人具有以下特点:(1)机器人辅助超声成像,用于对COVID-19 患者的肺部和炉膛进行远程检查;(2)机器人辅助的远程创伤评估,包括超声成像,以评估COVID-19 患者的肺部受累严重程度;(3)用于COVID-19测试的半自动口咽拭子采样;(4)通过遥控机器人平台提供的护理帮助; (5)医务人员使用机器人远程控制COVID-19 患者的重症监护室中的呼吸机;(6)机器人辅助手术,其中利用5G技术执行了四个超远程腹腔镜手术;(7)在猪肠吻合术上成功测试了有监督的自主软组织手术;(8)机器人辅助气管插管; (9)通过可以通过呼吸道成长为多个分支的软机器人进行气管内插管。
机器人感应与操纵
传感对于规划和执行安全的人机交互行为至关重要。大规模测试对于隔离受感染的受试者并阻碍病毒的传播至关重要。棉签机器人快速评估和诊断可以通过减少医护人员的参与来增强测试能力。
视觉传感与触觉反馈相结合,可以极大地增强机器人的导航和操作能力。软传感器的发展以及触觉技术的进步,为人造皮肤铺平了道路,从而为机器人提供了分布式的触感。未来的突破可能来自多种传感方式(例如压力,粗糙度,温度)的融合,传感器和执行器的集成以及控制策略的发展,这些策略将感知转化为反应性行为。
另一个关键的临床挑战是执行多种操作任务的能力,例如拭子采样,监视和管理呼吸机,调节输液泵,更换静脉输液袋以及身体移动的患者。因此,对各种医疗工具的灵巧操作是机器人的关键要求。协作机器人已经展示出强大的功能以及软机器人技术的进步提供了新的支持解决方案。顺应性材料的固有适应性,多种抓握方式和刚度调制可一起使用,以使单个机器人能够执行精细和强大的操纵任务。还设计了机器人,以从重症监护室的外面远程操作呼吸机,以防止医护人员接触风险。需要提高这些系统的操作灵活性和终端用户编程的简易性,以使此类解决方案可快速部署用于多种设备和控制任务。
机器人的自主性与AI机器学习
增加机器人的自主性可以提高人机交互的效率,并提高医疗保健系统的能力。自主机器人无需要求医护人员指挥机器人的每一个动作,而是能够在最少甚至没有直接监督的情况下执行任务,从而使医疗服务提供者能够专注于患者护理的关键方面并监督多个机器人。委派给机器人通常会引发以下问题:
(1)如何足够清楚地指定机器人的任务,以便机器人确切地知道要做什么?
(2)如何确保机器人安全正确地执行指定的任务;
(3)如何处理突发事件和不确定性。
这些挑战表明,在不久的将来,医疗机器人的最现实方法是共享自主权,它将医学专家的知识与机器人的能力相结合。
机器人帮助一线医疗工作者的最大机会在哪里?
医务人员每次进入要治疗感染性患者的房间时,都需要戴上新鲜的PPE。机器人不需要佩戴个人防护装备,从而为人类提供者腾出了宝贵的物资和时间。机器人可以做的越多,人类提供者就可以将更多的精力投入到护理的其他方面。
工程师应该关注的一大领域是增强机器人执行精细运动任务的能力,以便他们可以执行直接的患者护理任务,例如放置静脉输液,为气管插管或插入中心线。其他潜在任务可能包括基本的房间打扫,放血,呼吸机和监护仪的管理与操作。
护理人员和患者在设计这些机器人系统时应扮演什么角色,以确保它们有效且安全?
在某些任务中,患者可能更愿意由人类临床医生执行。除了任务选择之外,患者和护理人员还可以提供有关机器人构造中使用的材料(尤其是直接接触人类患者的组件)以及总体设计的重要反馈。
约翰·霍普金斯大学的研究人员:“团队正在努力改进ICU机器人,以提供更高的准确性和呼吸机的保真度。我们还研究了机器人在使用3D相机和力传感器进行肺部超声成像中的用途。最后,我们正在研究其他自主手术机器人程序,例如缝合和肿瘤切除术。”
应对机遇与挑战
未来的机器人将在传染病的临床护理中发挥更大的作用。必须克服能力,动员和传染病特定环境的障碍,以实现灵巧,可快速部署和智能的系统,同时增加自主性并增强身体互动的能力。
按照这种方法,可以预见的是,机器人技术将为临床医生带来增强的解决方案,为医护人员提供在下次传染病暴发期间安全,远程和有效地治疗患者的工具。
更多人机协同与人机交互感知与控制解决方案@南京合越智能科技有限公司,www.3xmaker.com
协作机器人医疗应用、动作捕捉、触觉传感器、电子皮肤、实时定位技术与可穿戴传感器